問題の対称性を活用した身体化視覚ナビゲーション
- Post by: admin
- 2025-03-27
- No Comment
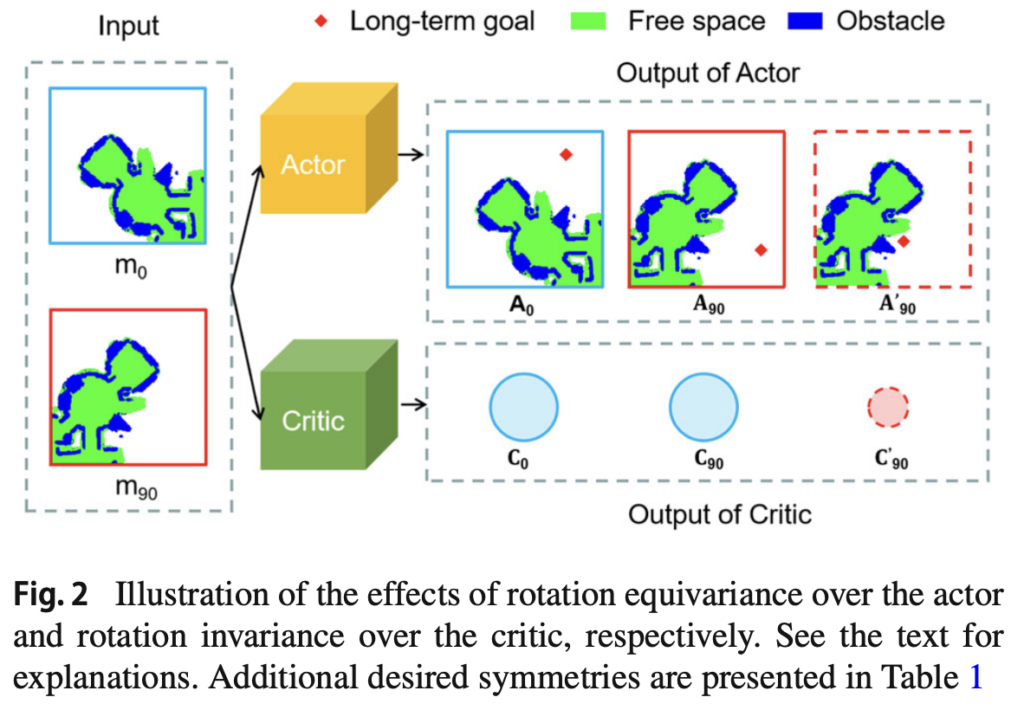
自律移動ロボットや拡張現実などの分野で注目される身体化(embodied)視覚ナビゲーションは、未知環境内でロボットが自己の位置を認識しながら探索や目標物体の捜索を行うために不可欠な技術である。しかし、これまでの深層強化学習(RL)を用いた手法は、訓練環境とテスト環境との統計的な乖離により、未知の分布(OOD)の環境で性能が低下し、一般化能力に課題があった。本研究は、ナビゲーションタスク特有の帰納的バイアス、すなわち入力の変換に対する等変性(equivariance)や不変性(invariance)をネットワークに組み込むことで、より頑健なナビゲーションシステムの実現を目指している。具体的には、Active Neural SLAM(ANS)を基盤とし、グローバルポリシーを担当するアクターとクリティックの各ネットワークに対して、理想的な対称性を持たせる設計が求められる。アクターは入力マップの平行移動や回転に対して等変であり、クリティックは回転に対して不変でなければならないが、従来の手法ではこれらの性質が十分に担保されていなかった。
提案手法
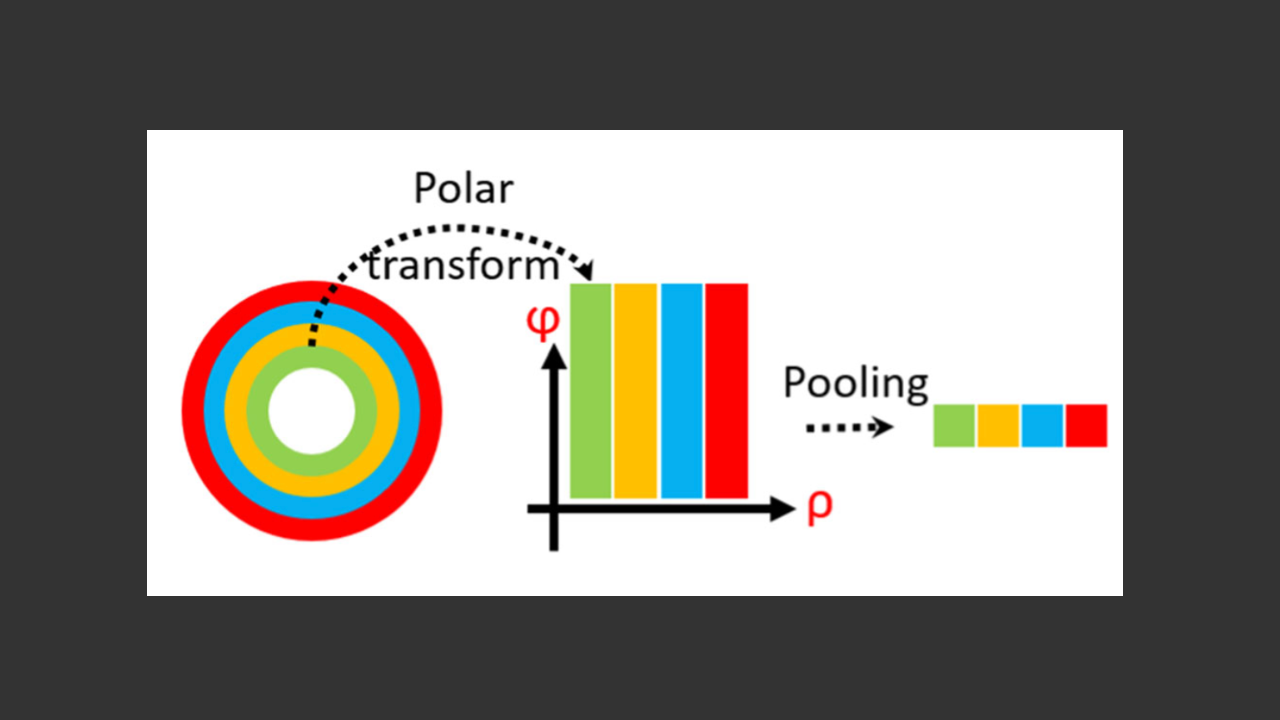
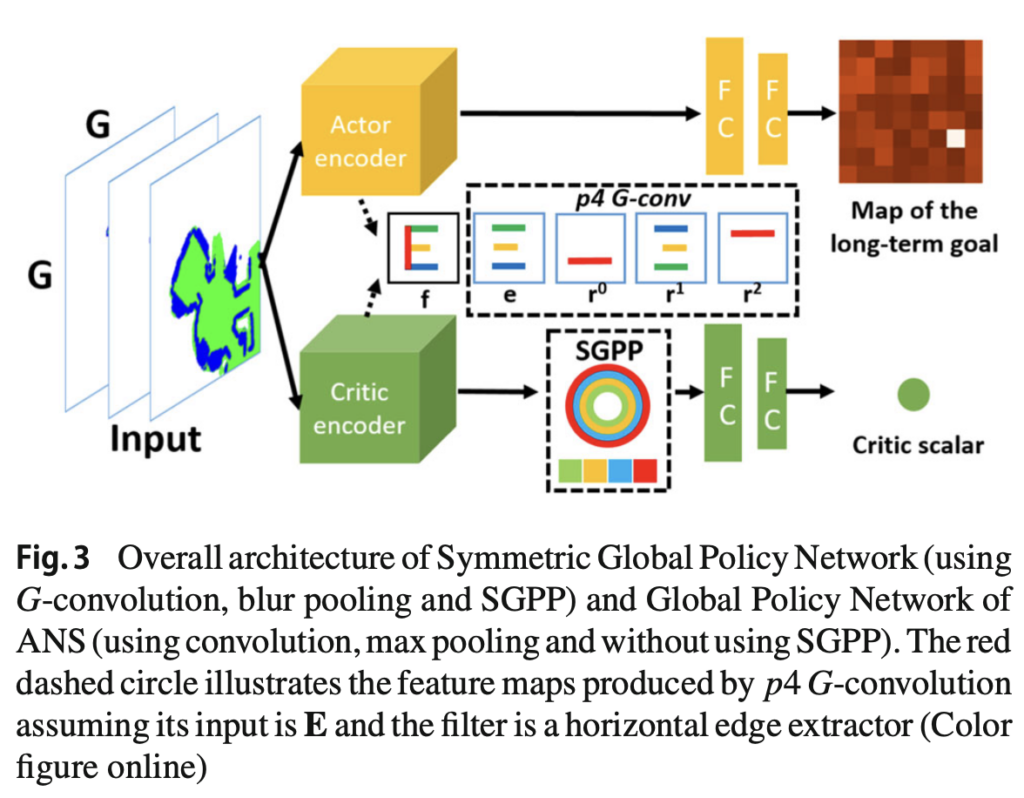
本研究では、ANSのグローバルポリシーモジュールを改良し、アクターとクリティックがそれぞれ理想的な対称性を持つように設計する新たなニューラルアーキテクチャ「シンメトリー対応ネットワーク」を提案する。まず、アクターには、入力マップから長期目標を出力する際、回転および平行移動に対して等変な性質が求められるため、標準的な畳み込み層を、回転等変性を実現するp4 G-畳み込みに置換し、さらにダウンサンプリング時にはブラー・プーリングを採用して平行移動の等変性を保持する。一方、クリティックは入力マップから将来の累積報酬をスカラー値として出力するが、回転に対しては不変である必要がある。そのため、クリティックネットワークの最終部に、新たに設計した半グローバル極座標プーリング(SGPP)層を導入し、極座標変換と円周方向の平均プーリングにより、回転に対する不変性を実現している。これにより、両ネットワークは、タスクの幾何学的特性を反映した理想的な対称性を獲得し、訓練データに依存しすぎない汎用的な表現学習が可能となる。
実験結果
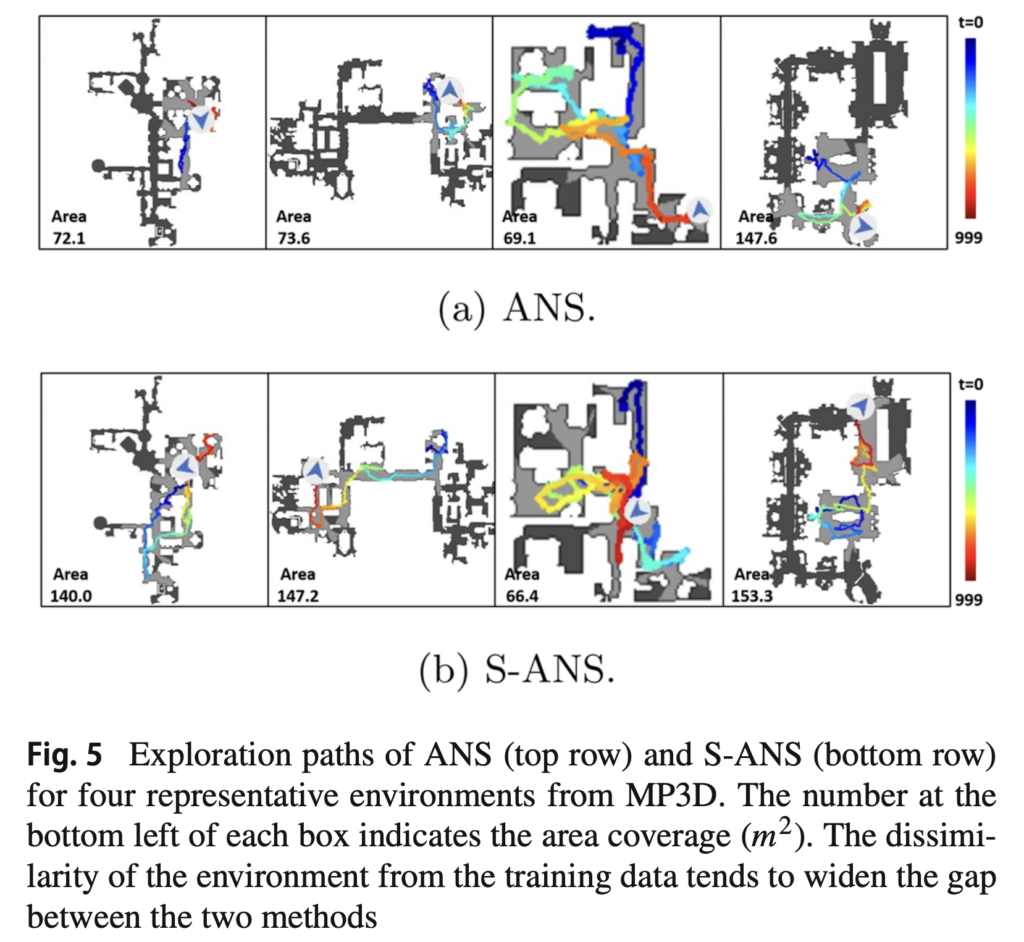
提案手法は、GibsonおよびMatterport3D(MP3D)といった現実的な環境シミュレータ上で評価され、視覚探索および物体目標ナビゲーションのタスクにおいて、従来手法と比較実験が行われた。GibsonとMP3Dの両データセットにおいて、訓練環境とテスト環境が異なる場合でも、シンメトリー対応ネットワークを用いたS-ANS(シンメトリー対応ANS)は、従来のANSよりも探索エリアのカバレッジが大幅に向上し、特に未知環境での一般化性能が顕著に改善された。さらに、物体目標ナビゲーションにおいても、SemExpを基盤としたS-SemExpの導入により、成功率や経路効率を示すSPLが向上し、目標達成までの平均時間も短縮された。加えて、回転不変性の定量評価や内部特徴表現の類似性解析により、G-畳み込みおよびSGPP層が、クリティックの出力において優れた回転不変性を実現していることが示された。一方、G-畳み込みの採用によりメモリ使用量が増加するという課題も明らかとなったが、全体としては、帰納的バイアスを効果的に組み込むことで、従来手法を上回る頑健なナビゲーション性能が得られた。
結論
本研究は、身体化視覚ナビゲーションにおける一般化問題に対して、タスク固有の対称性(等変性と不変性)をニューラルネットワークに組み込む新たなアーキテクチャを提案した。アクターとクリティックそれぞれにおいて、理想的な対称性を実現するため、p4 G-畳み込みやブラー・プーリング、そして新たに設計したSGPP層を導入することで、未知環境への適応力を大幅に向上させることに成功した。実験結果は、視覚探索や物体目標ナビゲーションにおいて、従来のANSやSemExpを凌駕する性能を示しており、特に訓練環境と大きく異なるテスト環境下での効果が顕著である。本手法は、帰納的バイアスを活用することで、RLの過学習を抑え、汎用性の高いナビゲーションモデルの構築に寄与するものであり、今後の実環境への展開やさらなる計算効率の改善が期待される。
発表論文
Liu, Shuang, Masanori Suganuma, and Takayuki Okatani. “Symmetry-aware neural architecture for embodied visual navigation.” International Journal of Computer Vision 132.4 (2024): 1091-1107.
@article{liu2024symmetry,
title={Symmetry-aware neural architecture for embodied visual navigation},
author={Liu, Shuang and Suganuma, Masanori and Okatani, Takayuki},
journal={International Journal of Computer Vision},
volume={132},
number={4},
pages={1091--1107},
year={2024},
publisher={Springer}
}