車両SLAM高速化のためのグラフネットワークによる高速バンドル調整
- Post by: admin
- 2025-03-27
- No Comment
SfMや視覚SLAMの分野において、バンドル調整(BA)はカメラ姿勢と3次元ランドマークの位置を最適化する重要なプロセスである。実際、多くの視覚SLAMシステムでは、局所的に最新数フレームのキー フレームとそのランドマークに対してBAを実行し、システム全体の精度とトラッキングの安定性を維持している。しかし、従来のBAはLevenberg-Marquardt(LM)法などの反復最適化手法に基づいており、計算負荷が非常に高いため、特に計算資源の限られた組み込みシステムにおいては、実行時間がボトルネックとなり、リアルタイム性に問題を引き起こす。局所BAの処理時間が長いと、新たなキー フレームが生成できず、トラッキングが失敗するリスクも高まる。注)SfM: Structure-from-Motion、SLAM: Simultaneous Localization and Mapping
提案手法
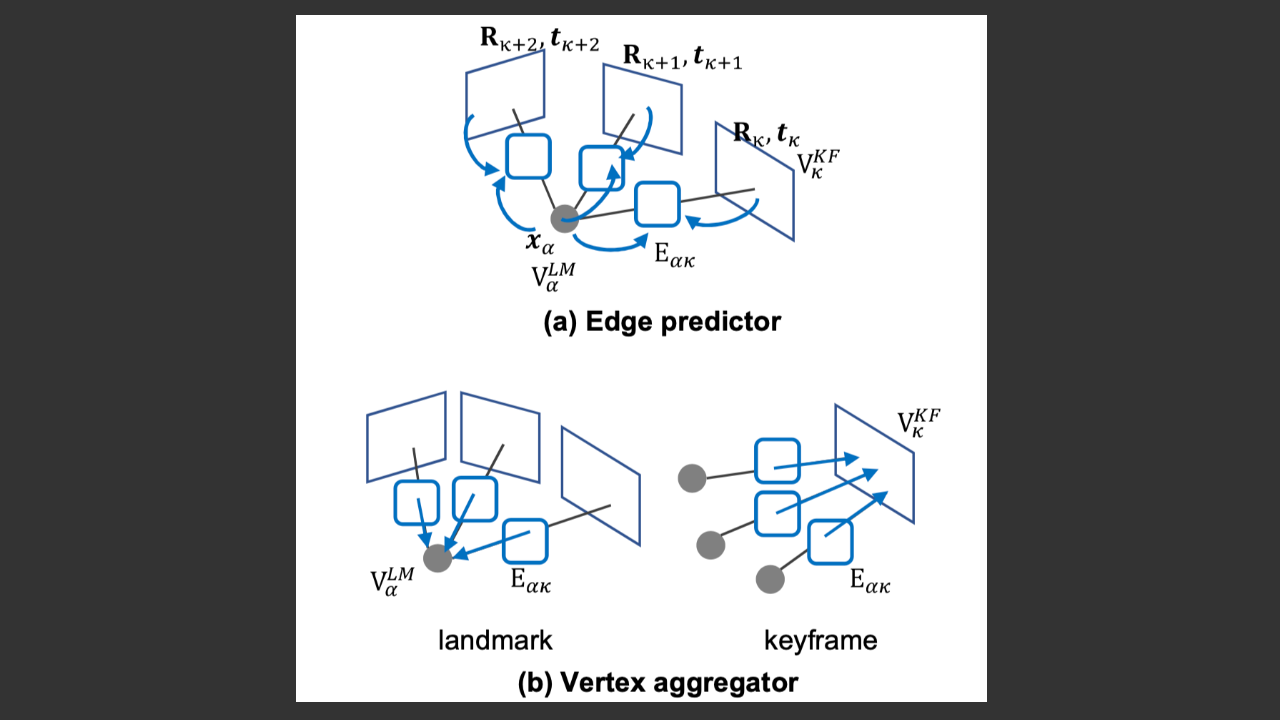
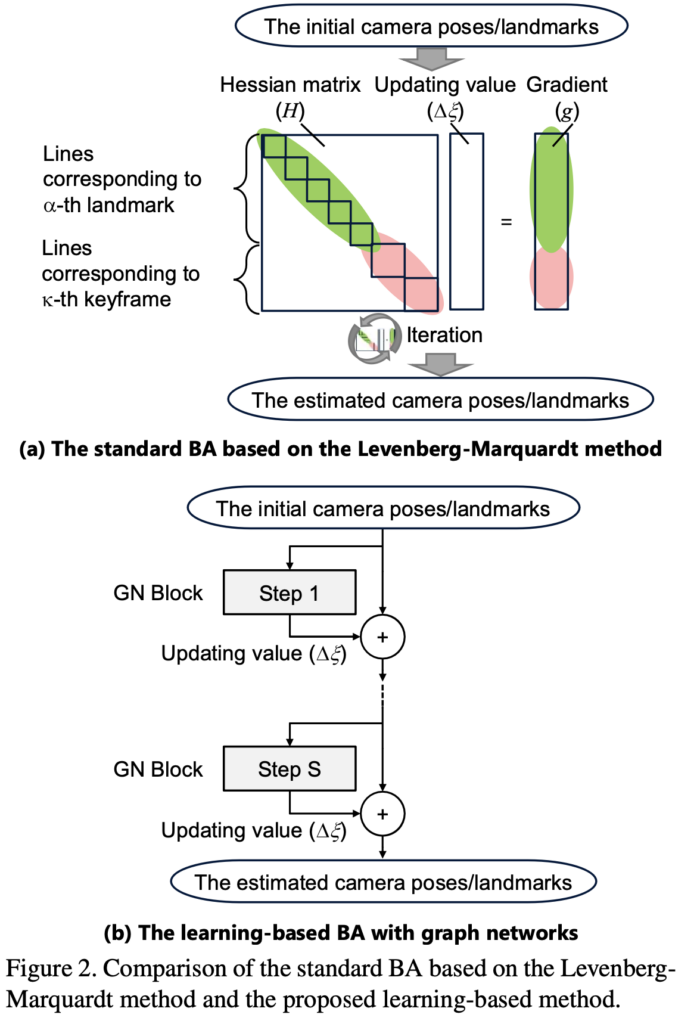
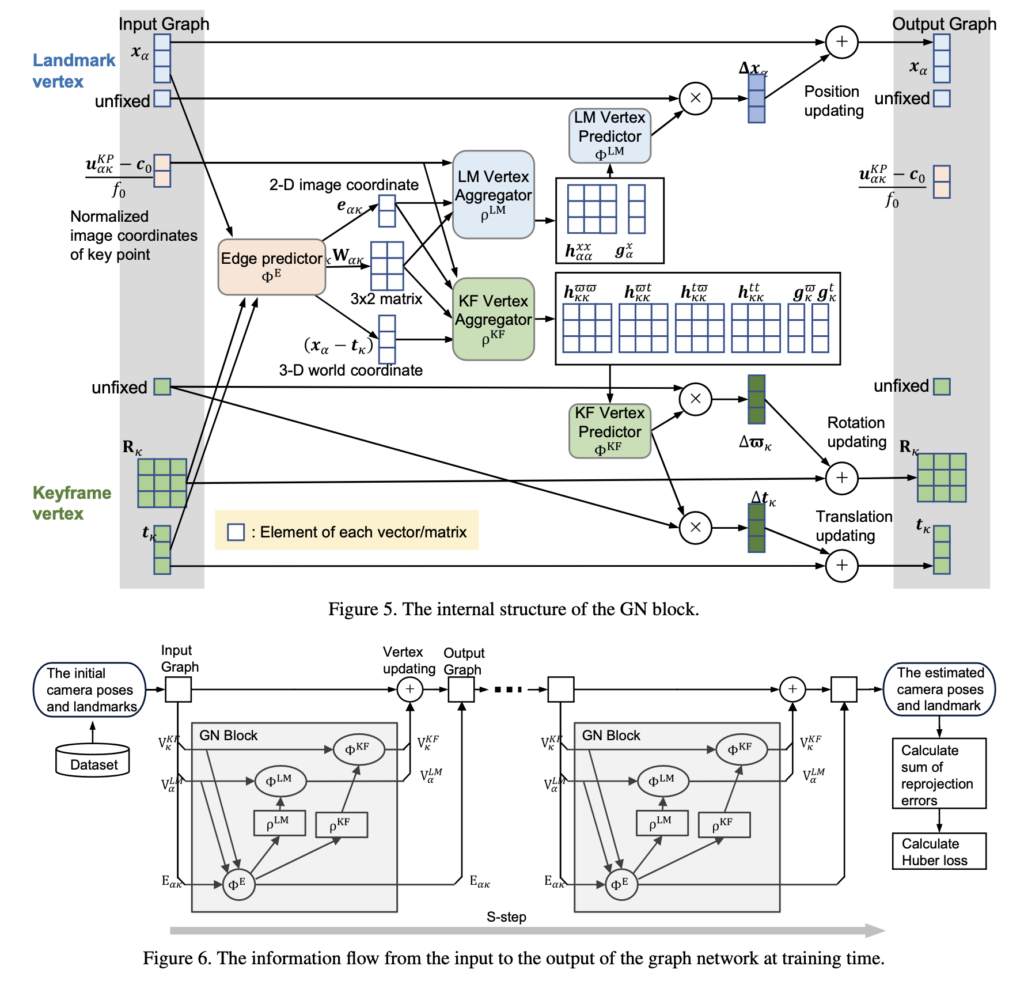
本研究では、従来の最適化手法に代わり、学習ベースのBA手法としてグラフネットワークを用いるアプローチを提案する。提案手法では、キー フレーム(カメラの姿勢)とランドマーク(3次元点)をノードとし、これらの間の視認性をエッジで表現したグラフ構造上で動作する。グラフネットワークは、このグラフを入力として、従来のLM法における正規方程式のブロック対角要素や勾配情報に着想を得た中間表現を用いながら、各パラメータの更新量を直接予測する。具体的には、各更新ステップごとにGN(Graph Network)ブロックを適用し、固定回数の反復処理を通じて最終的なパラメータ推定値を出力する。ネットワークの学習には、従来のBAと同様に、再投影誤差の合計をHuberロスとして用い、入力となる初期パラメータと最適化後のパラメータのペアから損失を最小化するように訓練する。
実験結果
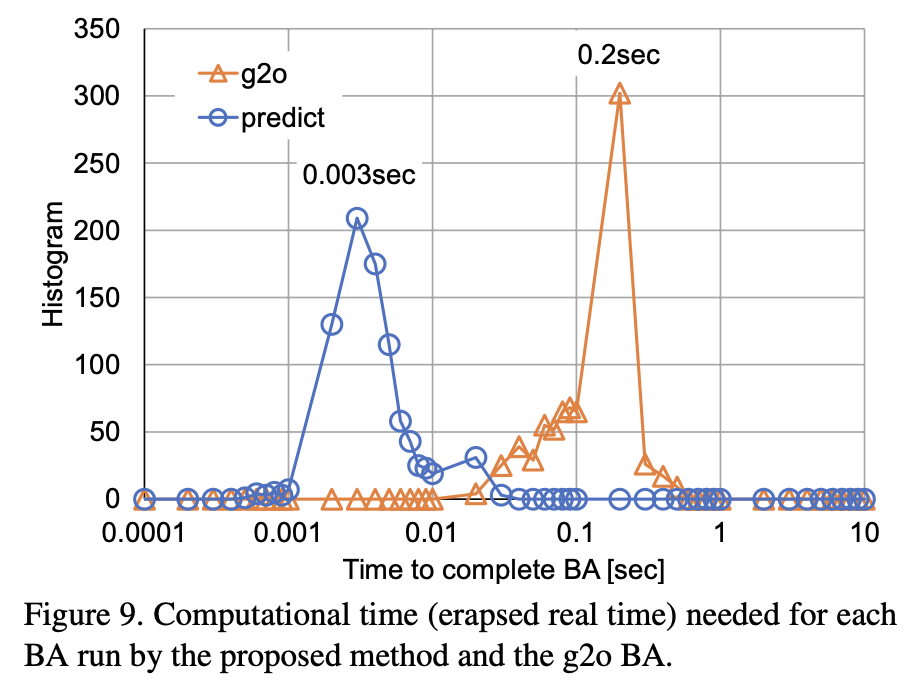
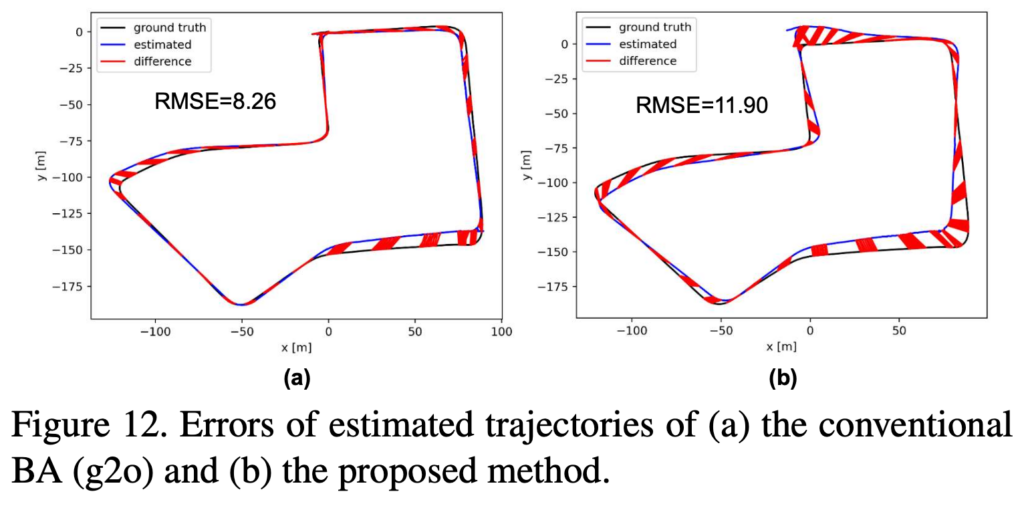
実験は主にKITTIデータセットを用いて行われ、従来のg2oを用いた最適化ベースのBAと比較された。個々の局所BAランにおいては、提案手法は再投影誤差の面で従来手法に若干劣る結果となるものの、その計算時間は従来の1/60~1/10程度に大幅に短縮されることが確認された。また、SLAMパイプライン全体においてg2o BAを提案手法に置き換えた場合、局所BA処理が高速化されるため、より頻繁なキー フレームの生成が可能となり、システム全体のトラッキングの堅牢性が向上することが示された。これにより、計算資源の限られた環境下でも実用的なSLAMシステムの実現に寄与することが期待される。
結論
本論文は、従来のLevenberg-Marquardt法に基づくBAを、グラフネットワークを用いた学習型手法で置き換えるアプローチを提案した。キー フレームとランドマークから構成される双極性グラフ上で、LM法の中間表現(ブロック対角のヘッセ行列要素と勾配情報)を利用しながらパラメータ更新を予測することで、反復最適化を大幅に高速化することに成功した。実験結果からは、提案手法が従来のg2o BAに比べて計算時間を劇的に短縮し、全体のSLAMシステムのリアルタイム性と堅牢性を向上させる一方、精度に関してはわずかな低下にとどまることが示された。今後は、さらなるネットワーク構造の改善や中間表現の最適化により、精度と速度の両立が期待され、組み込みシステムなどの現実環境での応用が進むことが見込まれる。
発表論文
Tanaka, Tetsuya, Yukihiro Sasagawa, and Takayuki Okatani. “Learning to bundle-adjust: A graph network approach to faster optimization of bundle adjustment for vehicular SLAM.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021.
@inproceedings{tanaka2021learning,
title={Learning to bundle-adjust: A graph network approach to faster optimization of bundle adjustment for vehicular SLAM},
author={Tanaka, Tetsuya and Sasagawa, Yukihiro and Okatani, Takayuki},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={6250--6259},
year={2021}
}